—— 以制造為底色、智能為成色,造就你的出色。
1、專業定位
智能制造工程是國際“工業4.0”和“中國制造強國”大背景下,為迎合新一輪的科技革命而設立的專業,是一個多學科交叉融合型專業。2018年5月28日,習近平總書記在中國科學院第十九次院士大會、中國工程院第十四次院士大會上的講話中指出,世界正在進入以信息産業為主導的經濟發展時期,要以智能制造為主攻方向推動産業技術變革和優化升級,推動制造業産業模式和企業形态根本性轉變,以“鼎新”帶動“革故”,以增量帶動存量,促進我國産業邁向全球價值鍊中高端。
太阳成集团tyc234cc勇立潮頭,依托學校工科優勢和學院學科特色,迎合國家和粵港澳大灣區經濟社會創新驅動發展的戰略需求,開設智能制造工程專業,通過産教融合、校企合作的協同育人模式,培養滿足新一輪工業革命技術創新需求的高素質技術人才,全力打造智能制造創新型人才培育的南方基地,為推動粵港澳大灣區制造業的數字化、智能化升級提供強有力的人才支撐。學生就業面寬,就業創業能力強,社會需求大而迫切,個人發展起點高,空間大,前景好。

圖∣ 智能制造戰略需求
2、培養目标
本專業培養掌握紮實的自然科學基礎理論和智能制造領域專業知識,具備發現、分析、解決複雜工程問題的專業能力和創新意識,能夠在智能制造及相關領域從事研究開發、設計制造、工程管理工作,适應國家和大灣區經濟社會創新驅動發展戰略需求,具有良好的職業道德和社會責任感,德智體美勞全面發展的社會主義事業合格建設者和可靠接班人。
培養目标的具體内涵包括:
目标1:運用智能制造領域設計、制造、管控、優化等方面的專業知識,解決複雜工程問題的能力。
目标2:具備組織與實施相關領域工程項目的能力,具有團隊合作精神和創新意識,通過終身學習取得職業生涯上的進步。
目标3:具備良好的人文社會科學素養、社會責任感和職業道德,具有健全的人格和正确的價值觀。
目标4:成為智能制造及相關領域的創新型人才,具有就業競争力,适應國家建設和大灣區創新驅動發展戰略需求。
3、培養規格
課内總學分不低于161.5學分,實踐教學環節學分不少于32.5(不含軍訓),合格授予工學學士學位。智能制造工程通過理論和實踐相結合,培養學生形成“一專多能”的智能制造專業知識體系與工程技術能力,能夠運用智能設計、智能管控、智能優化等理論方法與技術解決複雜工程問題,能夠從事智能制造及相關領域的研發、設計、制造與工程管理等工作。
4、課程體系
智能制造工程專業培養方案及其課程體系參照《機械類教學質量國家标準》、《工程教育認證标準》、《機械類專業補充标準》、《工程教育認證通用标準解讀及使用指南(2020版,試行)》等文件制訂。本專業遵循“寬口徑、厚基礎、強能力、高素質”的育人原則,突出對學生科學思維素養、創新能力與意識的培養,強化對學生解決工程問題、工程實踐與應用能力的鍛造,構建“形成三大教學模塊、塑造三類專業特長、拓展三大就業方向”的實施路徑。
智能制造工程以機械工程課程為基礎、智能制造課程為特色,主要學習人工智能、工業互聯網與大數據、智能傳感與檢測技術、制造系統建模與設計、智能裝備建模與分析、機器人技術、機械原理、機械設計、機電傳動控制、機械制造基礎、控制工程、運籌學等核心課程,同時也完成相關實驗實訓以及課程設計,包括機械制造技術訓練、電工電子實驗實訓、生産實習、智能裝備設計綜合實訓、智能制造系統綜合實訓、機器人系統綜合實踐、綜合工程實踐項目、機械設計課程設計等。
5、師資隊伍
專職教師共16名,其中教授6名,副教授6名,講師4名,均為博士學曆;博士生導師3人,碩士生導師12人,國家特支計劃科技創新領軍人才1人,國家重點研發計劃首席科學家1人,省傑青2人,廣東省珠江人才計劃青年拔尖人才1人,香江學者2人,廣東省揚帆計劃創新創業團隊1個,太阳成集团tyc234cc“百人計劃”特聘教授2人,太阳成集团tyc234cc青年百人計劃人才5人。專業教師主持國家重點研發計劃1項(728萬)、廣東省重點研發計劃1項(1000萬),國家基金10項,省市級項目30多項,近五年累計科研經費6000多萬元。獲得廣東省科學技術發明一等獎5項。申請發明專利200餘件, 已授權國内專利70餘件、美國專利3件,日本專利2件;發表高水平SCI論文100多篇,高被引論文5篇。
圖∣ 廣東省技術發明一等獎
6、教學條件
智能制造工程依托機械工程學科建設,機械工程學科擁有一級學科博士點、機械工程博士後科研流動站,是廣東省“211工程”重點建設學科、廣東省攀峰重點學科、廣東省“高水平大學”重點建設學科;教育部第四輪學科評估機械工程學科獲得B+,位列全國前20%;2021年軟科“中國最好學科排名”機械工程學科位列第20位,進入全國前10%,有力支撐工程學跻身ESI全球排名前1%。;為學校工程學科進入全球ESI排名前1%做出了重大貢獻。
智能制造工程專業所在學院太阳成集团tyc234cc擁有省部共建精密電子制造技術與裝備國家重點實驗室,以及國家地方聯合工程實驗室、國家級省部共建協同創新中心、國家級實驗教學示範中心、教育部重點實驗室,并有廣東省重點實驗室3個、廣東省工程技術研究中心6個和廣東省教學示範中心2個。學院擁有教學、科研實驗室面積約2.3萬平方米,儀器設備資産總值超過3億元。實驗室空間寬敞、環境舒适,教學實驗設備齊全,科研儀器先進精良。本專業同時共享國家級精品課程《工程制圖》、省級線上線下混合一流課程《機械設計》等課程資源,教學資源和條件一流。
7、培養特色
新一代智能制造将引領和推動新一輪工業革命,人工智能技術、新一代信息技術與先進制造技術的融合,将推動産品、裝備及其設計制造過程發生了革命性的變化。智能制造工程依托太阳成集团tyc234cc“機械工程”重點攀峰學科與國家重點實驗室建設。本專業聚集一批海内高層次人才,圍繞智能制造及機器人技術開展研究工作,在智能産線變型設計、模塊化機器人技術、數字孿生技術領域享譽海内外。第三方評估顯示,數字孿生産線設計領域發明專利數量一度排名全國第一、全球第二。本專業強調“一專多能”的人才定位,突出“産學融合、競教融合”的培養理念,将電子制造等産業實踐融入課程,将數字孿生等産業技術融入實訓,探索“理論教學實踐化,實訓教學能力化”的新型教學模式,保障學生四年均能達到“2項科技作品、1項學科競賽、1個科研項目”的“211”标準。本專業将全力培育一批科學化思維與智能化理念兼具、創新意識與工程能力齊備的智能制造高端人才。

圖∣ 智能制造培養特色
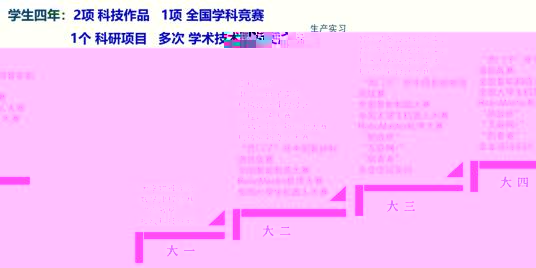
圖∣ “211”培養标準
8、學生競賽
兩大學生創新團隊助力實現“211”夢。
智能制造與機器人研究所教師指導“智能車間”和“DynamicX機器人”兩個創新團隊。智能車間創新團隊面向 “西門子”杯中國智能制造挑戰賽和全國智能制造大賽兩大國家級賽事,培養具有創新應用能力的智能制造人才,2022年首次參加“西門子”杯獲得廣東省二等獎、三等獎各1項。
DynamicX機器人創新團隊2021年首次參加RoboMaster機甲大師賽線下賽,就以南部八強進入全國賽,并奪得全國賽32強,成為甲級隊伍。參賽兩年以來,共獲得超級對抗賽全國二等獎、三等獎各1項;高校單項賽南部賽區一等獎2項,全國賽二等獎2項。
近幾年,團隊教師指導學生獲得“互聯網+”全國銀獎、廣東省金獎;“挑戰杯”全國二等獎、廣東省特等獎等獎項。
圖∣ 智能車間創新團隊及作品

圖∣ Dynamic X機器人創新團隊及作品



圖∣ 各大賽事獲獎
9、學生就業
智能制造工程是新工科專業,專業的設置獲得了華為、大族、美的、華星光電、視源電子等行業龍頭企業及研究院所的重點關注,企業提前招錄、定向鎖定意願強烈。畢業生能接觸智能制造領域内的科技前沿和研究熱點,可以選擇繼續深造或出國留學,國内外該領域研究生招生規模大、需求旺盛。
10、特色研究方向
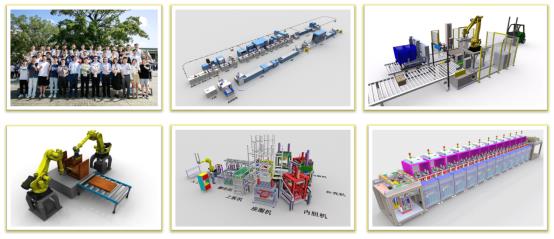
方向一:智能車間設計與優化
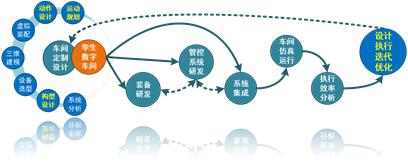
1、研發數字孿生産線三維智能設計平台,推動“智能車間設計與優化”工業軟件自主可控
2、面向3C制造、軍工、定制家具等行業開展智能車間設計、仿真與優化,加速制造企業數字化轉型
關鍵技術
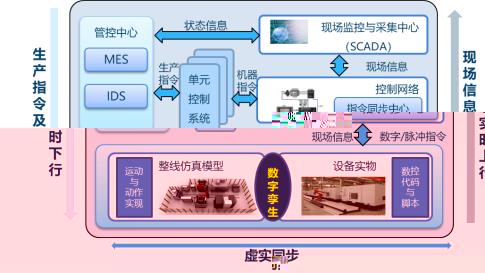
圖∣ 數字孿生産線模型
圖∣ 産線變型設計理論
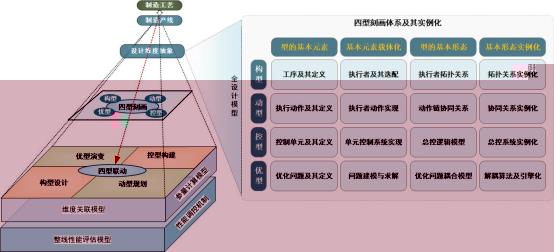
圖∣ 産線“構型-動型-控型-優型”四型聯動的變型設計技術
主要研究成果
圖∣ 自主研發的智能工廠數字化設計與優化平台——DTS

圖∣ 産線設計案例
方向二:智能優化與排樣算法
“基于組化的構造式排樣優化算法”,研發了包括一維線材、二維矩形件、二維不規則、三維堆疊與裝箱的全系列工業軟件,面向制造業、物流等行業推廣應用。
關鍵技術
啟發式掃搜與超啟發搜索算法
組化技術與構造式排樣優化算法
基于代理的耦合優化問題
構型搜索方法
…..
圖∣ 組批
主要研究成果
圖∣ 排樣系統案例
方向三:可重構機器人模塊及其系統
1、先進機器人關節模塊與末端功能模塊
2、機器人模塊化和可重構技術
3、機器人系統自主感知、規劃與控制

圖∣ 可重構機器人模塊
圖∣ 工業級可重構機器人模塊和系統

圖∣ 模塊化機器人在高壓輸電線上的應用


圖∣ 娛樂、教育和科研用迷你模塊化機器人
方向四:機器人與智能制造
1、機器人離線編程系統與數字孿生
CAD/CAM/Robotics一體化
l 三維軌迹生成
l 典型作業工藝庫
l 工作空間可視化
l 運動生成與仿真
l 現場标定功能
l 智能傳感器接口
l 軌迹實施修正
l 數字孿生(虛實同步)
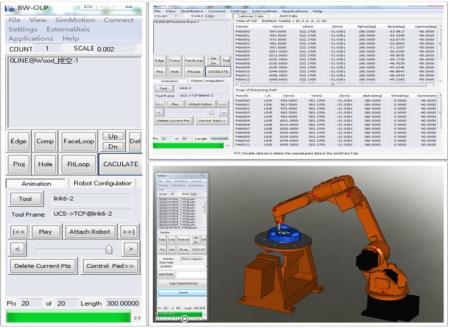
圖∣ 機器人離線編程與數字孿生系統
2、零部件表面光整加工(抛光、打磨、和去毛刺等)

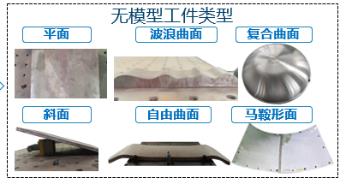

圖∣ 零部件表面光整加工系統及實物
3、非結構化環境中的機器人現場自主焊接

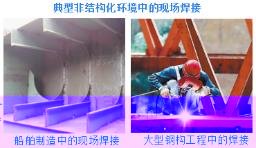
圖∣ 非結構化環境中的機器人現場自主焊接
方向五:自主移動操作機器人系統
1、環境地圖構建與定位(SLAM)
2、具有環境條件不變性和可擴展性的視覺導航
3、移動-操作協調控制

圖∣ SLAM地圖

圖∣ 自主移動操作機器人
方向六:智能服務機器人
1、基于語音、視覺和肢體語言的多模态人機自然交互
2、人工智能及其在高逼真仿人服務機器人上的應用

圖∣ 多模态人機自然交互機

圖∣ 高逼真仿人服務機器人




